

近日,365英国上市官方网站李振波教授团队研究论文《当跟踪器“遇见”游鱼:鱼类多目标跟踪基准与框架》(When Trackers Date Fish: A Benchmark and Framework for Underwater Multiple Fish Tracking)被人工智能领域顶级国际学术会议AAAI-2026(The 40th Annual AAAI Conference on Artificial Intelligence,CCF-A类会议)以Oral形式录用。
水下多目标跟踪是水产养殖监测和海洋生态研究的核心技术。相比于陆地场景,水下环境“幽暗”、鱼类外观高度相似以及非线性的“随性”游动,使得现有的多目标跟踪(MOT)技术面临巨大挑战。针对这一痛点,本研究提出了一套全新的水下多目标跟踪解决方案,有助于捕获到鱼类的“行为语言”,为解决如何实现鱼类“行为语言”到“信息语言”的通用翻译这一重大渔业科技难题提供方法支撑。
现有水下数据集往往场景单一、分辨率低,难以训练出鲁棒性强的模型。为此,本研究构建了目前最具挑战性的水下鱼类跟踪数据集MFT25。该数据集包含15个多样化视频序列,涵盖40余万个精细标注的边界框。MFT25数据集直观展示了水下跟踪面临的四大核心挑战:1)视觉退化严重:水体对光的吸收和散射导致图像模糊、光照不均甚至产生折射变形,极大地干扰了目标特征提取;2)高度外观相似:同种鱼类在纹理、颜色上几乎无法区分,一旦发生交错,跟踪器极易“认错”;3)高频遮挡:高密度养殖环境下,鱼群重叠现象频发,导致目标频繁丢失;4)非线性运动:不同于车辆的刚性运动,鱼类具有柔性形变和急转弯等突发性运动特征,导致传统运动模型失效。
针对上述挑战,本研究提出了一种尺度感知与无迹跟踪器(SU-T)。该框架创新性地引入了无迹卡尔曼滤波,有效解决了鱼类快速转向、非线性游动带来的轨迹预测偏差问题。同时,针对鱼类细长的身体结构,研究设计了FishIoU匹配机制,在计算重叠度时充分考虑了鱼体形态与尺度变化,显著降低了身份切换的发生率。实验结果显示,即便在鱼群高密度聚集、频繁相互遮挡以及快速游动的复杂场景下,SU-T依然能够保持目标身份的连续性与准确性,克服了传统方法中常见的轨迹断裂和身份跳变问题。
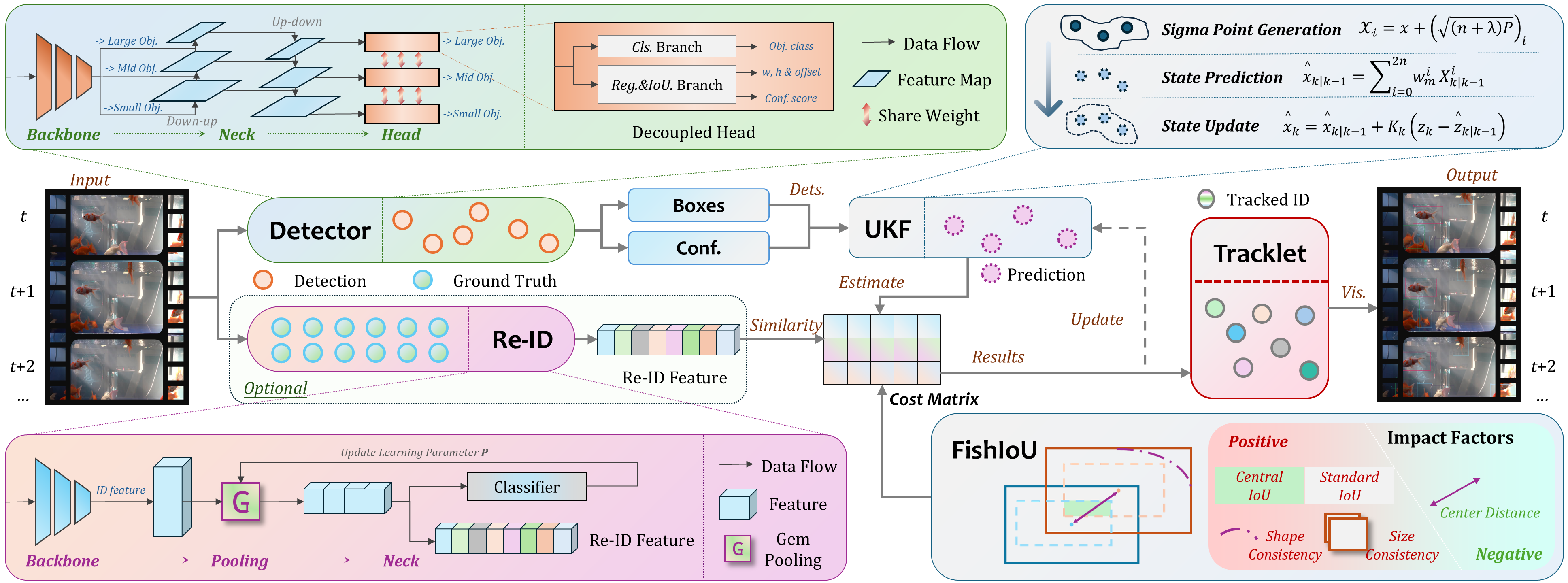
SU-T跟踪整体框架图
与现有算法相比,SU-T在MFT25基准上展现了卓越的性能。SU-T在HOTA、IDF1等多项核心指标上取得最优性能,证明了该方法在处理长时间序列跟踪任务时的鲁棒性与稳定性。
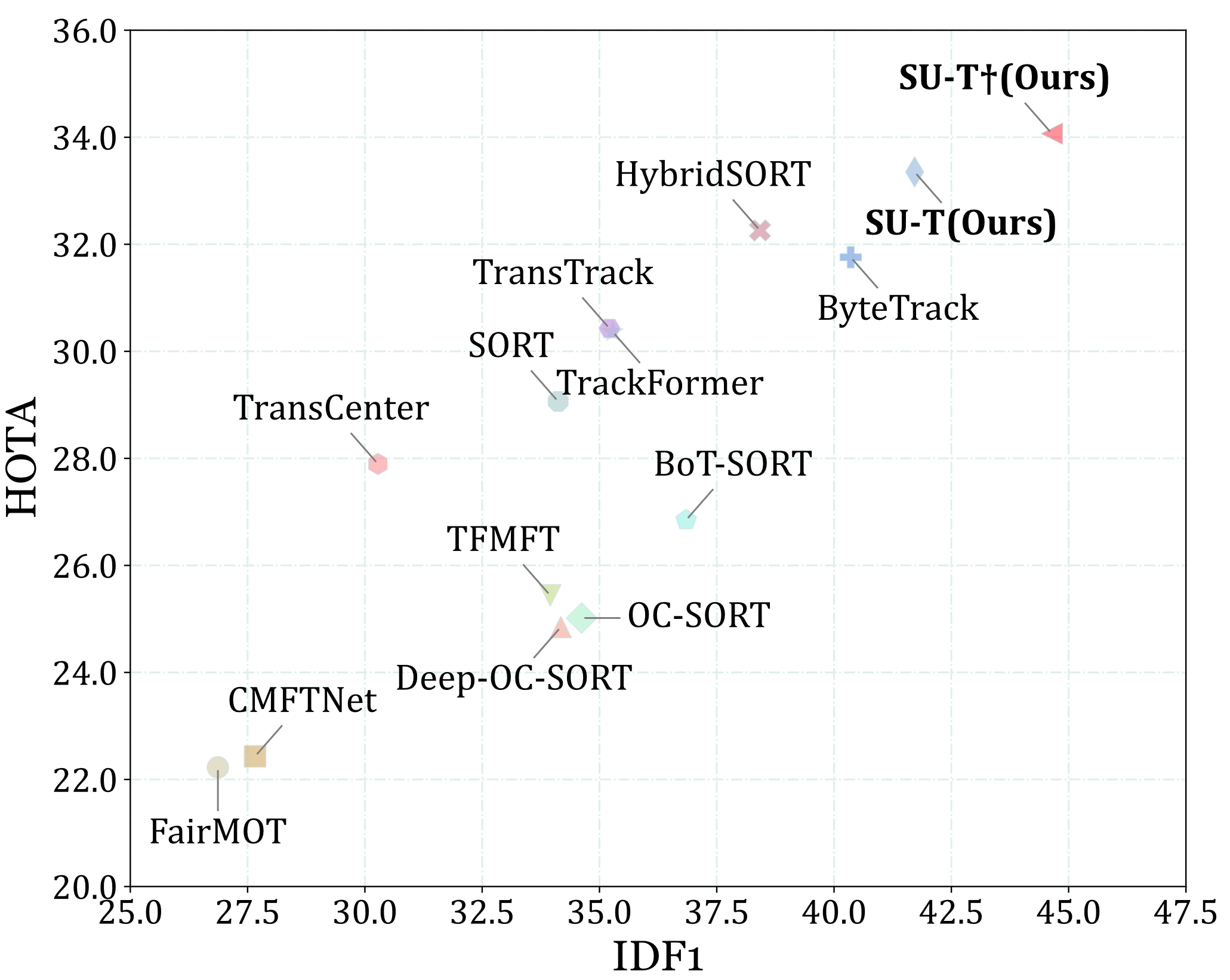
不同跟踪器在MFT25上的性能表现
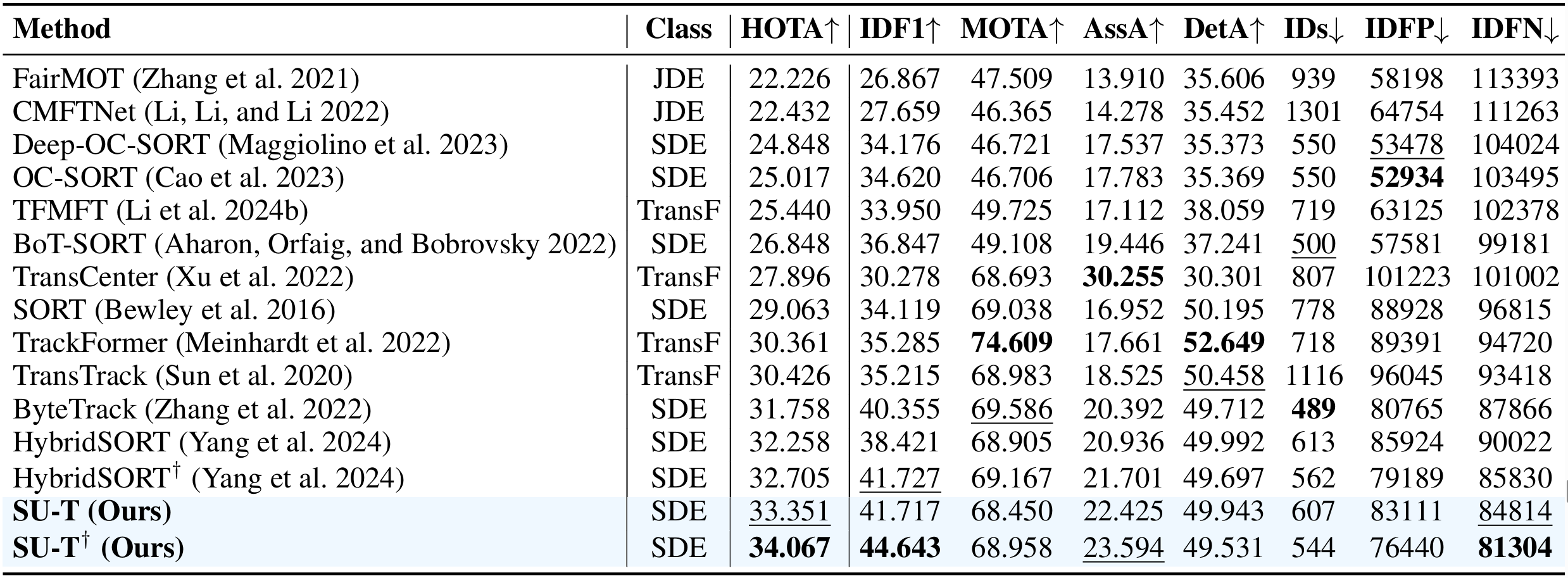
SU-T与现有算法在MFT25上的性能对比
论文工作第一作者为365英国上市官方网站博士生李蔚然,通讯作者为李振波教授。团队研究生刘业强、郭倩男、魏弋杰以及新加坡国立大学Hwa Liang Leo教授参与了论文工作。该研究得到了北京市智慧农业创新团队项目(BAIC10-2025-E14)、中国农业大学国家数字渔业创新中心、农业农村部农业信息化标准化重点实验室、农业农村部智慧养殖技术重点实验室、农业农村部国家数字农产品流通(供应链与物流)创新分中心以及中国农业大学农业水资源高效利用全国重点实验室、2115国家数字渔业创新中心和智能养殖与饲料高效利用创新团队、国家留学基金委(编号:202406350102)的资助。
代码链接:https://vranlee.github.io/SU-T/

